I am currently a postdoctoral researcher at LAAS-CNRS in Toulouse, France. I received my MS and PhD from Carnegie Mellon in 2022 and 2024, respectively, and BE from Vanderbilt University in 2020.
During my PhD, I worked with Dr. Aaron Johnson in the Robomechanics Lab at Carnegie Mellon University.
I work at the intersection of control theory, machine learning, and social factors. My work focuses on enabling robots to operate safely and robustly in complex, public environments by explicitly accounting for uncertainty in perception, dynamics, and interaction.
I develop methods that combine model-based approaches such as optimal control, state estimation, and sensitivity analysis with learning-based techniques including reinforcement learning and world models. I also study how robots interact with human-centered environments, integrating social, legal, and infrastructural considerations into system design. My goal is to build autonomous systems that are not only capable, but also reliable, interpretable, and aligned with societal expectations.
Here is my research output that I have worked on:
Contact-Robust Trajectory Planning via Parametric Sensitivity Analysis for Hybrid Robotic Systems
2026 IEEE ICRA
Posted on June 2, 2026
Robust RL Navigation Via Sensitivity-Aware Observation Augmentation
2025 IROS Workshop on The Art of Robustness Surviving Failures in Robotics
Posted on October 20, 2025
Robust Sensitivity-Aware Chance-Constrained MPC for Efficient Handling of Multiple Uncertainty Sources
2025 IEEE RA-L
Posted on August 11, 2025
Navigating a Complex World: Improving Robot Outcomes Through Social, Regulatory, and Control Theoretic Approaches
Thesis Defense
Posted on September 6, 2024
Improving Equity in Robot Deployment: A Study of Food Pantry Patrons
In Preparation
Posted on June 28, 2024
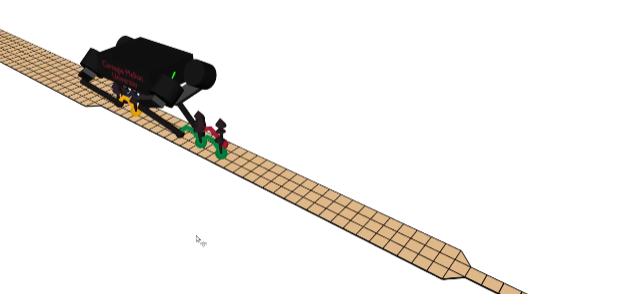
Designing Safe Quadrupedal Gaits
2024 IEEE ICRA Workshop on Advancements in Trajectory Optimization and Model Predictive Control for Legged Systems
Posted on May 17, 2024
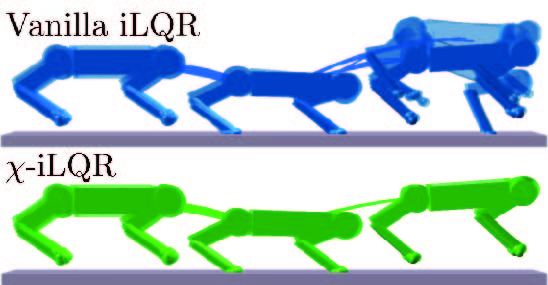
Convergent iLQR for Safe Trajectory Planning and Control of Legged Robots
2024 IEEE ICRA
Posted on May 15, 2024
Grounding Robot Locomotion in Self-Defense Law
2023 IEEE RO-MAN
Posted on August 31, 2023
By Air or by Land: How Locomotion Methods Dictate Drone Ethics
2022 IEEE ICRA Workshop on Addressing Ethical and Technical Challenges in the Development, Use, and Governance of Lethal Autonomous Weapons Systems
Posted on May 27, 2022
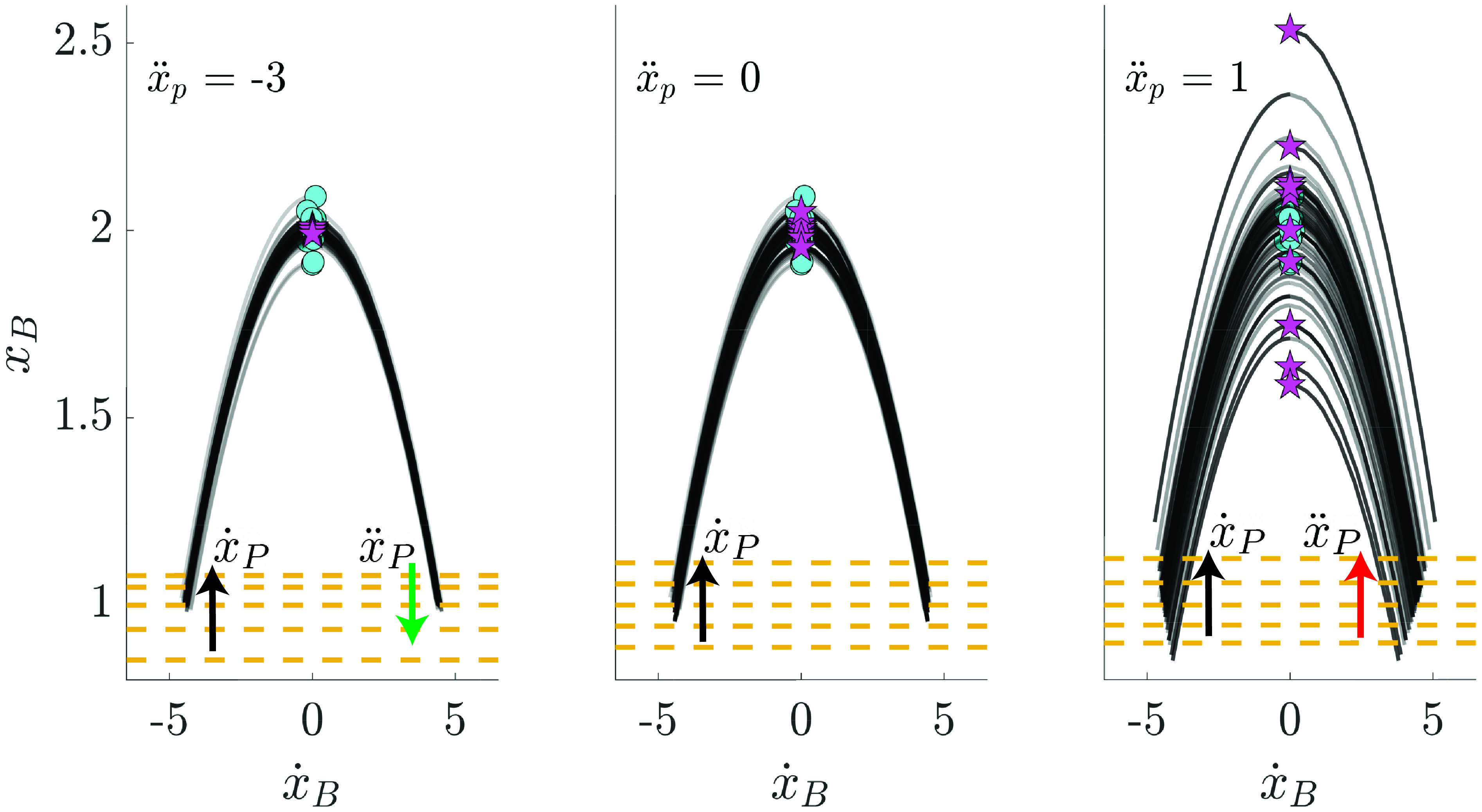
Hybrid Event Shaping to Stabilize Periodic Hybrid Orbits
2022 IEEE ICRA
Posted on May 25, 2022